
![]()
国土交通省は27日、高速道路上での自動運転の実現に向け「第1回オートパイロットシステムに関する検討会」を開催した。
同システムの実現にかかる課題の整理や検討を行い、2013年3月頃をめどに中間報告を行う予定。
同年10月14~18日開催の「ITS世界会議東京2013」で実現時期を公表し、2020年代はじめの実現を目指す。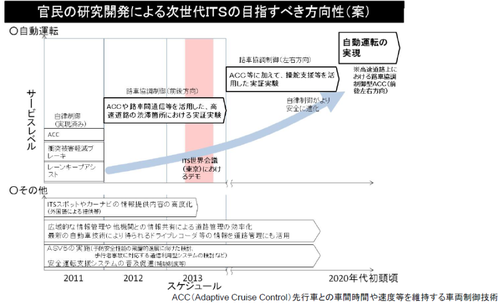
2011年5月に「次世代ITSに関する勉強会」を設置し、2012年3月に公表した勉強会の取りまとめで検討会の設置に言及していた(図は取りまとめの抜粋)。2カ月に1回程度の頻度で会議を開く。
検討会には、自動車メーカーからはトヨタ自動車と日産自動車、ホンダ、マツダ、富士重工業が参加。座長には、東京工業大学の朝倉康夫教授が就く。
オートパイロットシステムは、先行車との車間距離や速度を維持する車両制御技術「Adaptive Cruise Control(ACC)」を高度化した「路車・車車協調型の運転支援」の発展系に位置づけている。
利用シーンには、現在の技術水準を踏まえ、高速道路で の車線走行時や、特定の運営会社がドライバーからある時間、ある区間の運転を請け負う場合を想定。専用車線までの合流や専用車線から分流した後は、ドライ バーが運転することをイメージしている。
検討項目には
1)事業・ニーズ面、
2)制度面、
3)技術・安全面、
4)社会受容面、
5)インフラ面、
6)社会経済的効果面の6つをあげており
2)では損害事故発生時の責任の所在や、現在のドライバー主権の考え方との整合性などを検討課題としている。
なお、米国では軍事を背景に自律移動に関する研究開発が活発になされており、米Google社が開発を進めている無人自動車「GoogleCar(グーグルカー)」(動画)は、その1つ。
トヨタのプリウスをベースにレーザレンジファインダー(LRF)などを搭載しており、マウンテン・ビューにあるGoogle本社からロサンゼルスの支社まで自律移動できたことを公表している。ITSとは異なる切り口で自動運転を可能にしつつある。
NEDO、トラックの自動走行車両を披露、速度変化に対応して隊列走行
.jpg)
新エネルギー・産業技術総合開発機構(NEDO)は25日、トラックが先頭の車両について走行間隔を調整しながら自動運転や隊列走行する技術を披露した(写真、動画)。 トラックに搭載したカメラやセンサで前方車両や白線を認識しつつ、自動車同士が通信して速度の変化に対応。
車間距離を維持しながら前のトラックを追尾して いく。大型トラック3台を用いて80km/h、車間距離4mで自動隊列走行すれば、1台で走行するのに比べて燃費を最大で15.9%向上できる。東名高速 道路など幹線高速道路での活用を想定。2020年代初頭の実用化を目指す。
トラック前方に搭載したミリ波レーダとレーザーレーダにより障害物を認識。また、側面にカメラとセンサを付加しており、真下の白線を認識して位置制御を 行う。車車間通信では、いすゞ自動車、日野自動車、三菱ふそうトラック・バス、UDトラックスの市販トラックにシステムを追加。仕様や制御方式が違っても 協調できるようにした。
産業技術総合研究所つくば北サイト(茨城県つくば市)で行われたデモでは、3台の大型トラックと1台の小型トラックが隊列走行する様子などを公開した。
先頭のトラックが自動でハンドルを切ったりブレーキをかけたりすると、その情報が0.02秒間隔で後続車に伝わり、その動きに連動して速度を制御する。
2008年から始まったエネルギーITS推進事業の成果。日産自動車、デンソー、NECをはじめとする産官学の研究チームが技術を開発した。
����������������������������������������������
{kind=link}